SBOX-L-xx-v1.2.0
SBOX-L-xx-v1.2.0
Download SBOX-L-xx-v1.2.0.zip (565.21 MB)
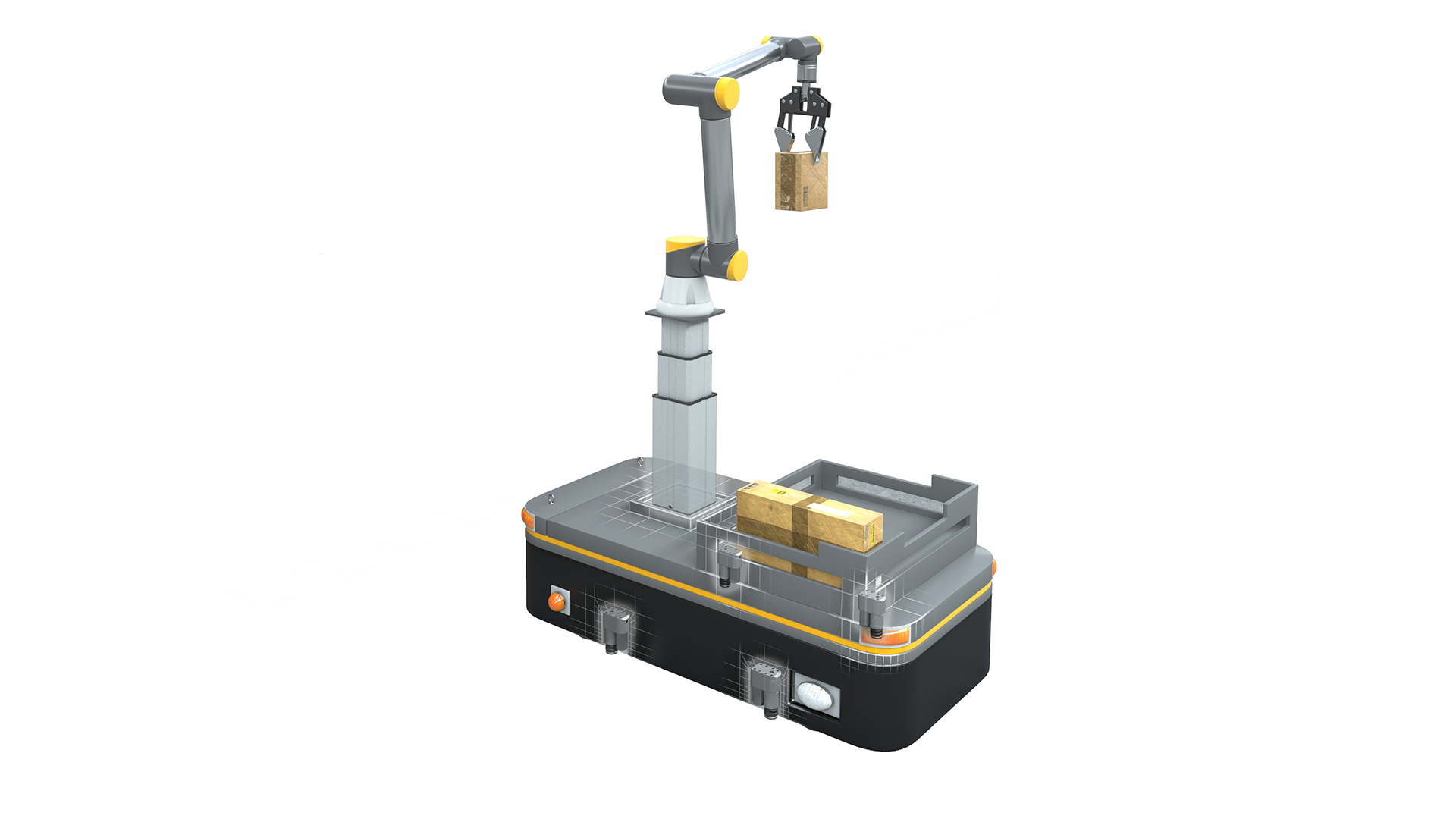
协作机器人通常用于码垛,一旦码垛达到一定高度,协作机器人也会达到其极限位置。易于组装的升降柱组件通过沿垂直轴移动来增加任意协作机器人的可达范围。 协作机器人底座可在码垛过程中升高或降低,以使其始终处于最佳工作位置。这一范围的扩大提高了生产效率并降低了成本。 LIFTKIT-0S是一个即插即用的系统,包括一个升降立柱和一个控制单元,可通过以太网端口连接到协作机器人,并通过TCP/IP标准协议进行编程和控制。用一组简单的命令就可以实现复杂而精确的运动任务。该系统包括安全认证附加继电器,如果连接到协作机器人的安全输出端口,可用于运行中的安全停止程序。LIFTKIT-0S系统配有一个底部安装板,需要一个上部定制板(未提供)将协作机器人连接到立柱。


| LIFTKIT-0S-601 | LIFTKIT-0S-TX-601 | LIFTKIT-0S-620 | LIFTKIT-0S-TX-620 | |
|---|---|---|---|---|
| 推压负载 | 1 500 N | 1 500 N | 1 500 N | 1 500 N |
| 牵引负载 | 0 | 0 | 0 | 0 |
| 兼容各品牌机器人 | 中小型机器人(50公斤):1.4米扩展范围及16公斤有效负载 | 中小型机器人(50公斤):1.4米扩展范围及16公斤有效负载 | 大型机器人(75公斤):1.8米范围及30公斤有效负载 | 大型机器人(75公斤):1.8米范围及30公斤有效负载 |
| 最大行程(mm) | 500至1400 mm | 500至1400 mm | 800 mm | 800 mm |
| 工作温度 | 10至+40 °C | 10至+40 °C | 10至+40 °C | 10至+40 °C |
| 防护等级 | IP 40 | IP 40 | IP 40 | IP 40 |
| 安全特性 | STO至PLe, Cat.4 | 标准产品不包含STO | STO至PLe, Cat.4 | 标准产品不包含STO |
| 空载最大速度(mm/s) | 80 mm/s | 80 mm/s | 80 mm/s | 80 mm/s |
| 占空比(%) | 10% (20% at 500 N) | 10% (20% at 500 N) | 10% | 10% |
Download SBOX-L-xx-v1.2.0.zip (565.21 MB)
 IL-07029-CN 机器人升降轴LIFTKIT-0S
IL-07029-CN 机器人升降轴LIFTKIT-0S
 IL-07040-EN-December 2024 - LIFTKIT-TX
IL-07040-EN-December 2024 - LIFTKIT-TX
 TC-08046-CN LIFTKIT 0S 操作手册
TC-08046-CN LIFTKIT 0S 操作手册
 TC-08048-EN-March 2021 - LIFTKIT quick start guide
TC-08048-EN-March 2021 - LIFTKIT quick start guide
 TC-08060-EN-December 2024 - LIFTKIT-TX manual
TC-08060-EN-December 2024 - LIFTKIT-TX manual
 TC-08061-EN-December 2024 - LIFTKIT-TX quick start guide
TC-08061-EN-December 2024 - LIFTKIT-TX quick start guide
 EL-03012-CN 柔性装配产线直线运动技术
EL-03012-CN 柔性装配产线直线运动技术
 EL-03014-CN-物料搬运解决方案
EL-03014-CN-物料搬运解决方案
 EL-03018-CN-机器人第七轴解决方案
EL-03018-CN-机器人第七轴解决方案

<p>越来越多机器人被用于生产线末端操作的码垛过程自动化。托盘堆放可从地面开始,也可以延伸到超过两米的高度;因此,标准协作机器人在如此大的垂直夹持高度下,工作能力将达到其极限。

Construction is a labour-intensive industry with many repetitive tasks that can be physically demanding, monotonous,

New technologies improve laboratory equipment. Robotics plays an increasingly important role in the life sciences.
Autonomous vehicles (AV) that transport a wide range of products or perform archiving/inspection tasks sometimes in h




